Systems that get built.
Mechanical work across the full project lifecycle — from equipment siting and feasibility studies through construction-phase support, where drawings meet the field and the systems actually have to run.
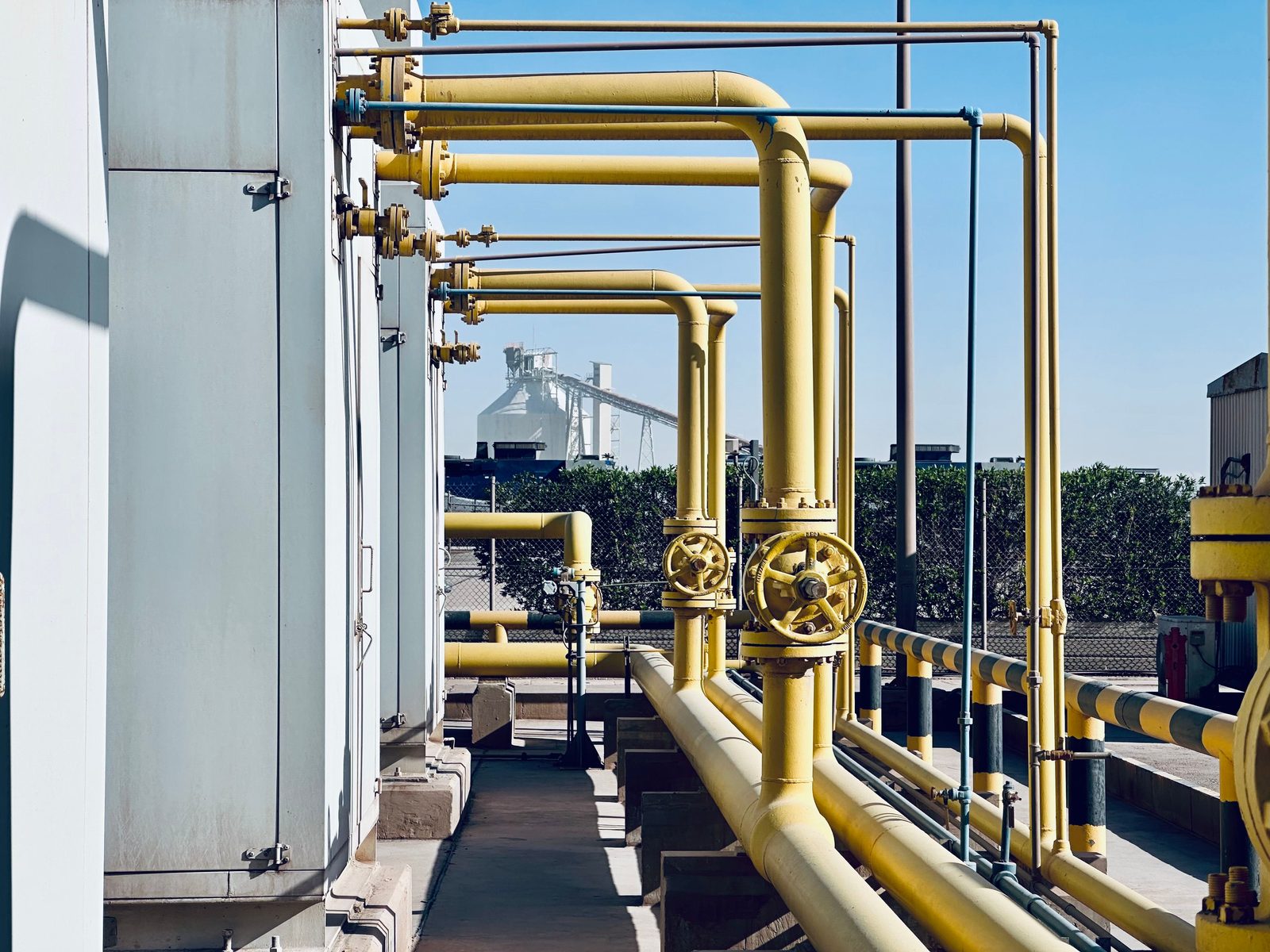
Equipment & systems engineering
Hands-on with mechanical equipment for the built environment — deaerators, pumps, and piping systems — evaluating performance, layout, and cost trade-offs across competing configurations.
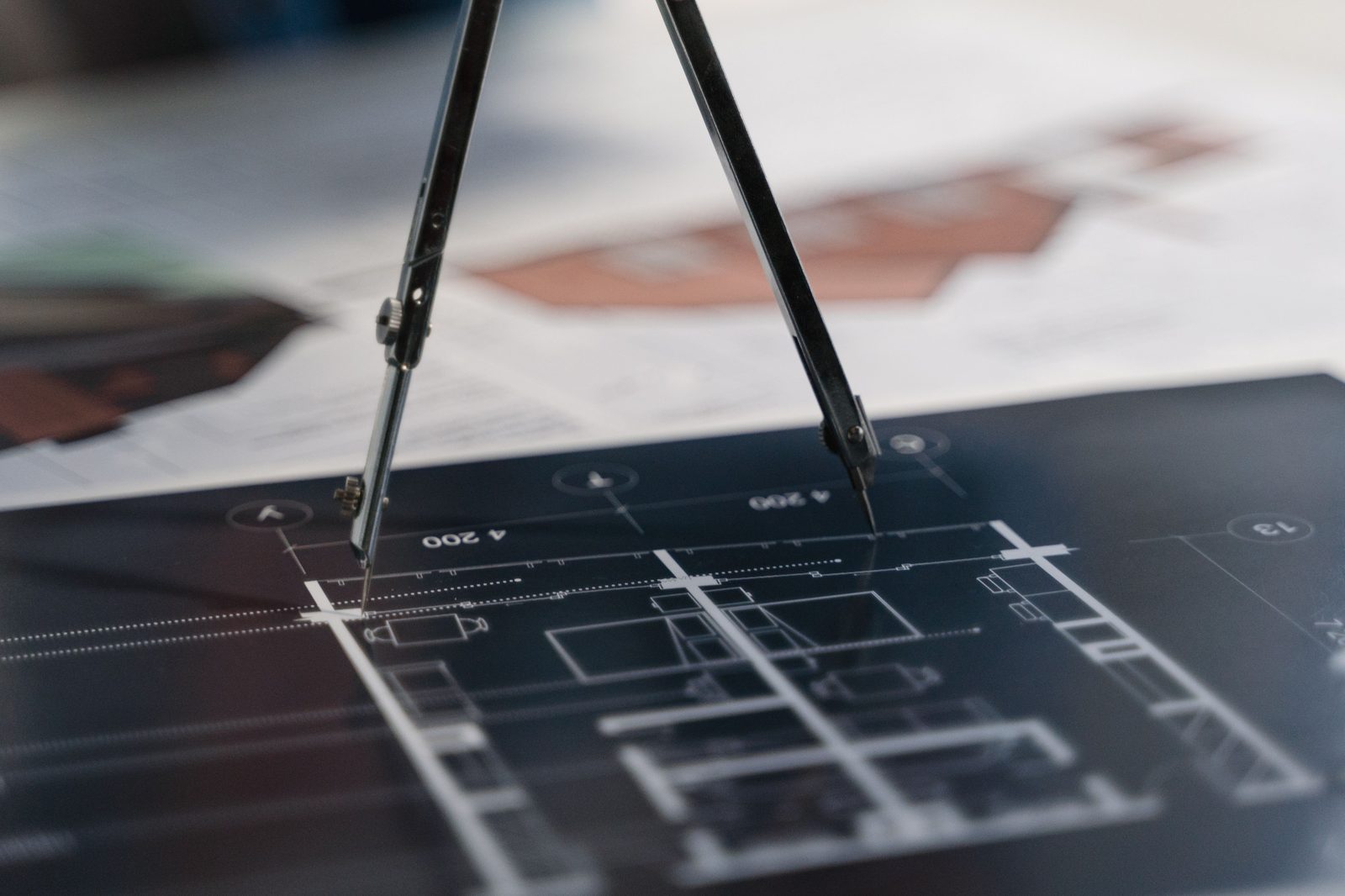
Siting & feasibility studies
Equipment placement and layout trade-off analysis — weighing mechanical, structural, and piping cost implications to support a clear, defensible decision path.

Construction-phase support
Submittals, RFIs, and contractor coordination through active construction — keeping the build moving and the installed systems true to the intent of the drawings.

Systems compliance review
Reviewing mechanical and plumbing drawings against regulatory requirements — reconciling design intent with agency review comments through resubmission and approval.